Z-0231
Jump to navigation
Jump to search



TFmini PLus Lidar Module(Distance measurement)
Description
TFmini Plus is a milestone of Benewake in the process of promoting the cost-effective -LiDAR.
Apart from low-cost, small-size and low-power-consumption, TFmini Plus also improves the frame rate,
introduces IP65 enclosures and optimizes various compensation algorithms.
These new characters greatly expand the application fields and scenarios of TFmini Plus.
Technical Specifications and Parameters
| Parameters | Values |
|---|---|
| Operating Range | 0.1m~12m1 |
| Accuracy | ±5cm@(0.1-6m) ±1%@(6m-12m) |
| Distance resolution | 5mm |
| Frame rate | 1-1000Hz(adjustable)2 |
| Ambient light immunity | 70klux |
| Operating temperature | -20°C~60°C |
| Enclosure rating | IP65 |
| Light source | LED |
| Central wavelength | 850nm |
| FOV | 3.6°3 |
| Supply voltage | 5V±0.5V |
| Average current | ≤110mA |
| Power consumption | 550mW(low power mode 85mW) |
| Peak current | 140mA |
| Communication level | UART,I2C,I/O |
| Material of enclosure | ABS+PC |
| Storage temperature | -20°C~75°C |
| Weight | 12g |
| Wire length | 30cm |
- 1 Range based on a standard whiteboard with reflectivity 90% in indoor condition;
- 2 Only frame rates meet the formula – 1000/n (n is Positive integer) can be set;
- 3 This is the theoretical number,the is some offset for the real number.
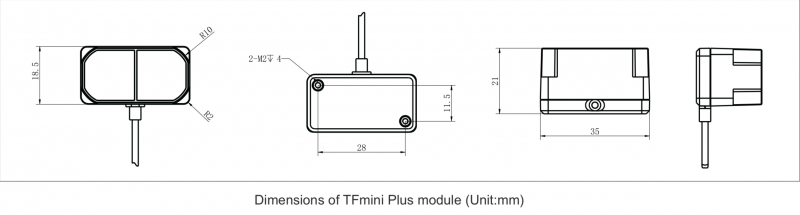
Technical Drawings

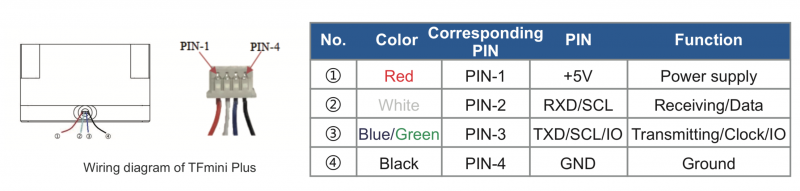
How to wiring the wire

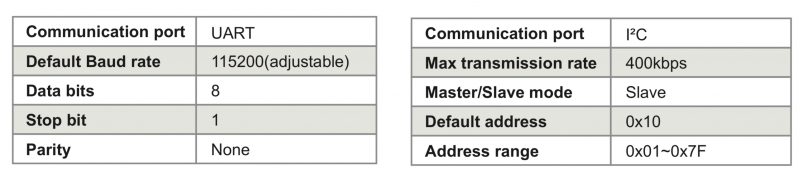
Communication Protocol

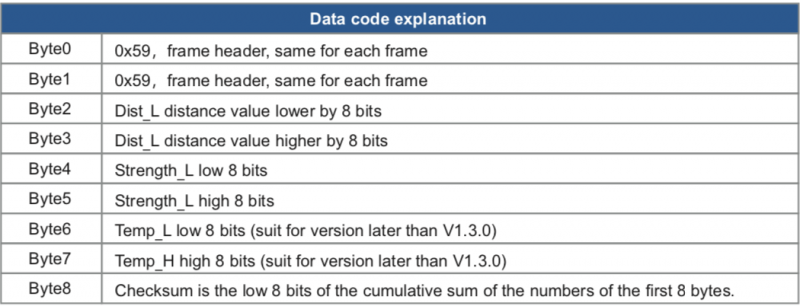
Data Format
The data frame contains 9 bytes, 2 bytes of frame head, 2 bytes of distance value (Dist_L and Dist_H), 2 bytes of signal strength (Strength_L and Strength_H), 2 bytes of temperature (Temp_L and Temp_H) and 1byte of checksum. All the data and commands are transmitted in hexadecimal format.


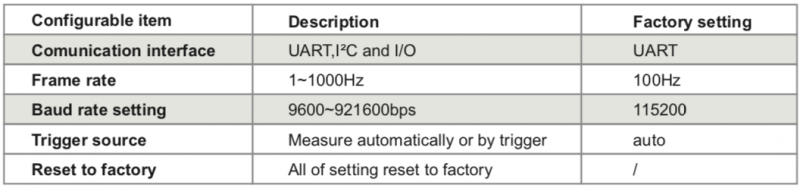
Configurable parameters

Common configuration commands Convention
- (1) Little endian transmission has been applied in multi byte data,i.e. low byte of data will be saved in lower address
- (2) Downlink frame:data from master computer to LiDAR
- (3) Uplink frame: data from LiDAR to master computer or other terminal
Frame Definition

Head:frame head of command frame(0x5A) Len:length of the frame, head and checksum included ID:identifier code of command Payload:data segment. Little endian format Checksum:sum of all bytes from Head to payload. Lower 8 bits.
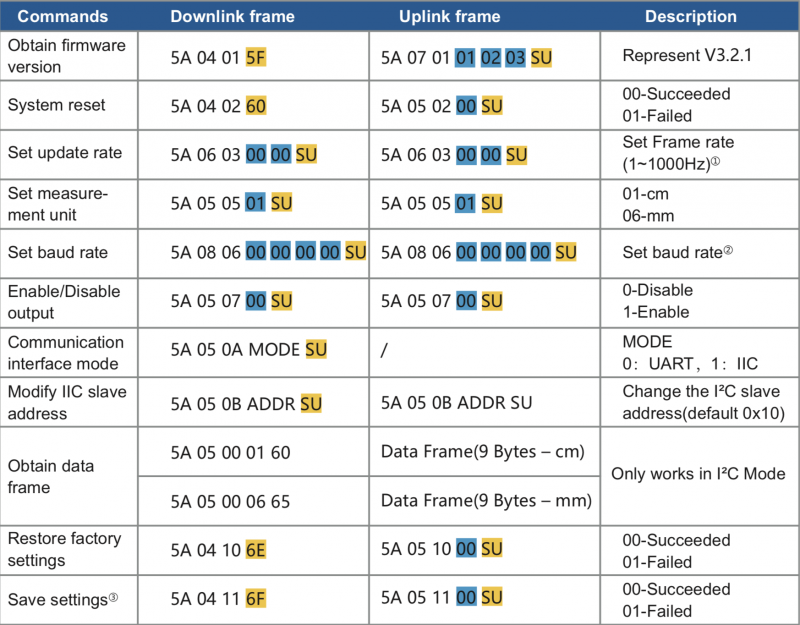
Commands

Bytes with yellow undertone represents checksum. Bytes with blue undertone represents data segment. 1 The default frame rate is 100Hz. The customized frame rate should be calculated by the formula: 1000/n (n is positive integer). Data stability will decrease with frame rate increasing. 2 Only standard baud rates are supported. When setting a high frame rate, a high baud rate is recommended to ensure data security. 3 Please always send the command of save settings when try to modify parameters of TFmini Plus,otherwise the settings will not take effect after power off.
User Manual Document
- PDF file:
File:SJ-PM-TFmini Plus A04 Product Mannual EN.pdf
FAQ
- Q: I already purchased the Lidar module. Still I think you didn't undersand the part which I need. I created a sketch diagram and attached it here with. In the diagram there is a unit called 'Adapter' in green colour. I need the name of that unit and the place where to purchase it. And the exact type of the `Pin` in red colour.

- A: To solve this problem, you need to connect the radar with the adapter board and pay attention to the wiring: white - green; green - white, red - red; black - black. and the same with TFmini Plus.
| Radar | Adapter board |
|---|---|
| White | Green |
| Green | White |
| Red | Red |
| Black | Black |