D-0013: Difference between revisions
Jump to navigation
Jump to search



(Created page with "==HC-SR04 Ultrasonic Module== ==Description== Ultrasonic ranging module HC - SR04 provides 2cm - 400cm non-contact measurement function.<br> The ranging accuracy can reach to...") |
|||
| Line 1: | Line 1: | ||
==HC-SR04 Ultrasonic Module== | ==HC-SR04 Ultrasonic Module== | ||
[[File:D 0010 1.jpg|right|320px]] | |||
==Description== | ==Description== | ||
Ultrasonic ranging module HC - SR04 provides 2cm - 400cm non-contact measurement function.<br> | Ultrasonic ranging module HC - SR04 provides 2cm - 400cm non-contact measurement function.<br> | ||
Revision as of 16:05, 9 May 2020
HC-SR04 Ultrasonic Module

Description
Ultrasonic ranging module HC - SR04 provides 2cm - 400cm non-contact measurement function.
The ranging accuracy can reach to 3mm.
The modules includes ultrasonic transmitters, receiver and control circuit.
Basic principle of work
- Using IO trigger for at least 10us high level signal,
- The Module automatically sends eight 40 kHz and detect whether there is a pulse signal back.
- IF the signal back, through high level , time of high output IO duration is the time from sending ultrasonic to returning.
- Test distance = (high level time×velocity of sound (340M/S) / 2
Features
- Easy to assemble
- Compatible with Raspberry Pi and Arduino and so on.
=Specifications
- Working Voltage DC 5 V
- Working Current 15mA
- Working Frequency 40Hz
- Max Range 4m
- Min Range 2cm
- MeasuringAngle 15 degree
- Trigger Input Signal 10uS TTL pulse
- Echo Output Signal Input TTL lever signal and the range in proportion
- Dimension 45*20*15mm
Pin Definitions
- 5V Supply
- Trigger Pulse Input
- Echo Pulse Output
- 0V Ground
Dimension

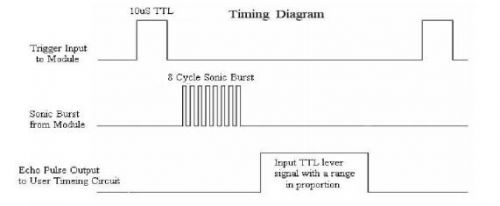
Timing Diagram
The Timing diagram is shown below. You only need to supply a short 10uS pulse to the trigger input to start the ranging, and then the module will send out an 8 cycle burst of ultrasound at 40 kHz and raise its echo.
The Echo is a distance object that is pulse width and the range in proportion .
You can calculate the range through the time interval between sending trigger signal and receiving echo signal.
Formula: uS / 58 = centimeters or uS / 148 =inch; or: the range = high level time * velocity (340M/S) / 2
we suggest to use over 60ms measurement cycle, in order to prevent trigger signal to the echo signal.

Gallery
|
 |
 |
 |
 |
 |
Package Includes
- 5 x Ultrasonic sensor

Documentations
Keywords
- Ultrasonic sensor, distance sensor, Raspberry Pi 4B, arduino